Joggen eines Roboters
Sehen Sie hierzu das Beispielprojekt Robotics_Jogging.project im Installationsverzeichnis von CODESYS unter ..\CODESYS SoftMotion\Examples.
Dieses Beispiel zeigt, wie eine Achsgruppe mit dem Baustein SMC_GroupJog2 gejoggt werden kann.
Es wird empfohlen, den CODESYS Depictor für dieses Beispiel zu installieren - die kostenlose Demoversion ist ausreichend. Alternativ können Sie die entsprechenden Code-Teile aus dem Beispiel entfernen, um das Beispiel ohne Depictor zu verwenden.
Applikation
Um einen möglichst allgemeinen Fall zu demonstrieren, hat das Beispiel folgende Funktionen:
Verwendung eines Roboters mit Singularitäten (6-Achs-artikulierter Roboter). Das Beispiel zeigt, dass Sie den Roboter im ACS durch Singularitäten fahren und dann in einer anderen Konfiguration kartesisch weiter joggen können.
Verschiebung und Verdrehung des Maschinenkoordinatensystem des Roboters (MCS) gegenüber dem Weltkoordinatensystem (WCS). So können Sie sehen, wie sich das Joggen im MCS und WCS unterscheidet.
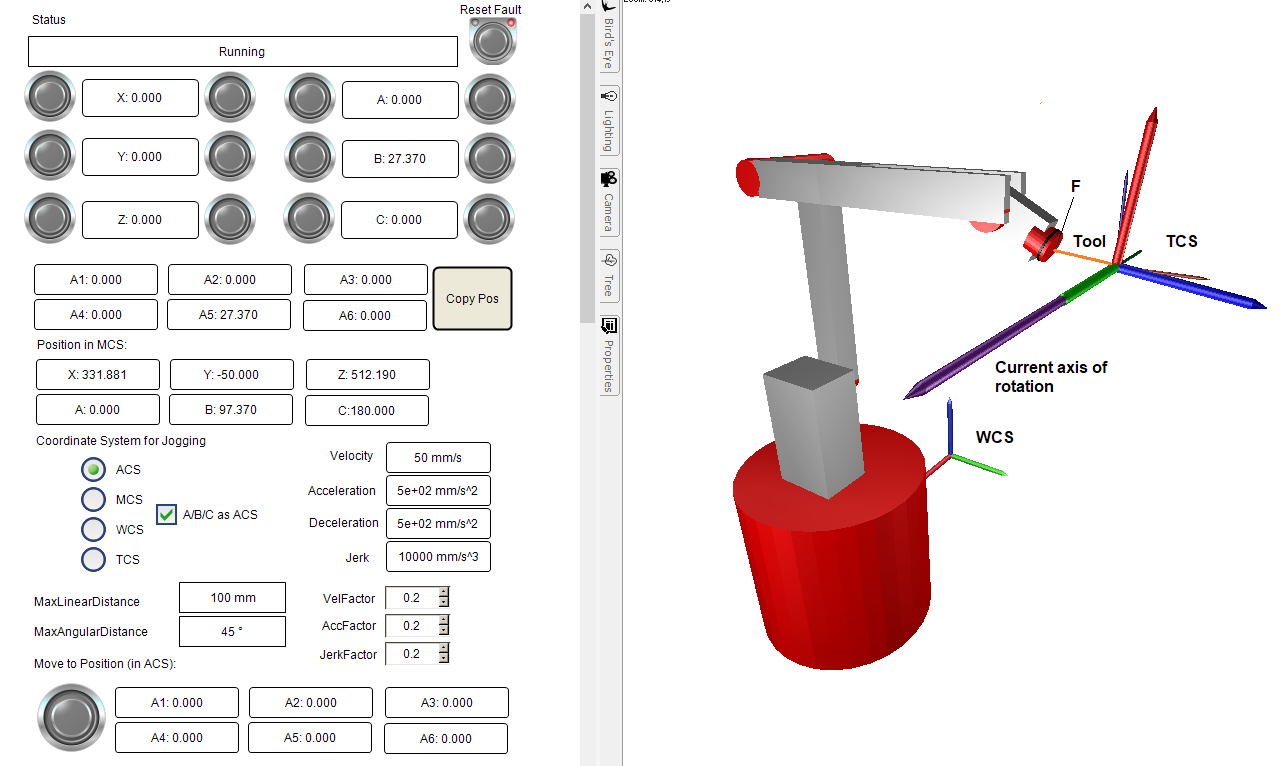
Konfiguration eines Werkzeuges, das gegenüber dem Flansch (F) verschoben und verdreht ist. In der Abbildung unten sehen Sie das Werkzeug sowie die Verschiebung und Verdrehung des TCS gegenüber dem Flansch (F).
Eine lineare Zusatzachse
Add0und eine rotatorische ZusatzachseAdd1.
Aufbau der Applikation
Hauptprogramm
Das Hauptprogramm
PLC_PRGbesteht aus einer Zustandsmaschine, diedie Achsgruppe aktiviert (Zustand 0)
das Tool konfiguriert (Zustand 5)
das MCS konfiguriert (Zustand 6)
das Joggen startet (Zustand 10)
Im Zustand 20 werden Fehler beim Joggen behandelt sowie Bewegungsbefehle angenommen (Schalter Move to Position in der Visualisierung)
Die weiteren Zustände dienen der Durchführung der Bewegung (60, 70) sowie der Behandlung und Quittierung von Fehlern (900, 1000)
Nach der Zustandsmaschine werden alle Robotikbausteine und das Programm
GroupJog2zyklisch aufgerufen sowie einige Berechnungen für die 3D-Darstellung im Depictor durchgeführt
Programm GroupJog2
Dieses Programm enthält eine Zustandsmaschine mit diesen Schritten:
In Zustand 10 werden die Eingänge von SMC_GroupJog2 gesetzt und es wird ausgelesen in welcher Konfiguration die Achsen des Roboters stehen (SMC_GroupReadActualPosition). Diese Konfiguration wird in Zustand 20 in der Achsgruppe konfiguriert (SMC_SetKinConfiguration).
In Zustand 30 wird auf Fehler beim Joggen reagiert sowie auf Änderungen der Einstellungen des Joggens, zum Beispiel auf ein geändertes Koordinatensystem. Bei Änderung wird zurück in Zustand 10 gewechselt.
Zustand 50 wird bei einer fallenden Flanke des Enable Eingangs betreten. Das Joggen wird mit MC_GroupHalt beendet.
Inbetriebnahme
Übersetzen Sie das erstellte Programm und starten Sie es. Über die Visualisierung können Sie den Roboter verfahren. Sie können alle relevanten Einstellungen für das Joggen definieren: Beispielsweise in welchem Koordinatensystem gejoggt wird und mit welcher Geschwindigkeit.
Wenn Sie den CODESYS Depictor installiert haben, ist es empfehlenswert, das Fenster mit dem Depictor (POU Scene) neben dem Visualisierungsfenster anzuordnen.
Der Depictor stellt das TCS (Tool-Koordinatensystem) vorne am Roboter dar. Außerdem wird die aktuelle Drehachse des TCS in violett dargestellt. Das ist hilfreich, um die verschiedenen Arten der Orientierungsänderung zu prüfen (testen Sie beispielsweise die Option ABC_as_ACS und das Koordinatensystem TCS).